

Wykonane pomiary
Na urządzeniu wykonano wiele testowych pomiarów z pośród których wybrano trzy przedstawione w dalszej części tego rozdziału. Przedstawione przebiegi maja na celu przybliżenie kilku podstawowych problemów związanych z konstrukcjami tego typu.
W celu dokładnego zrozumienia uzyskanych wyników konieczne jest przedstawienie testowanej konfiguracji sterownika. W tym przypadku urządzenie działa jako dwa niezależne moduły grzewcze, (górny i dolny) wyposażone we własne regulatory PID, własne czujniki temperatury i logicznie oddzielne tory zasilania. Zademonstrowany tu przebieg pomiarów jest szczególnie ciekawy, ponieważ pokazuje jak dwa niezależne tory grzewcze które wzajemnie wpływają na siebie starając się jednocześnie utrzymać żądaną temperaturę w komorze pieca
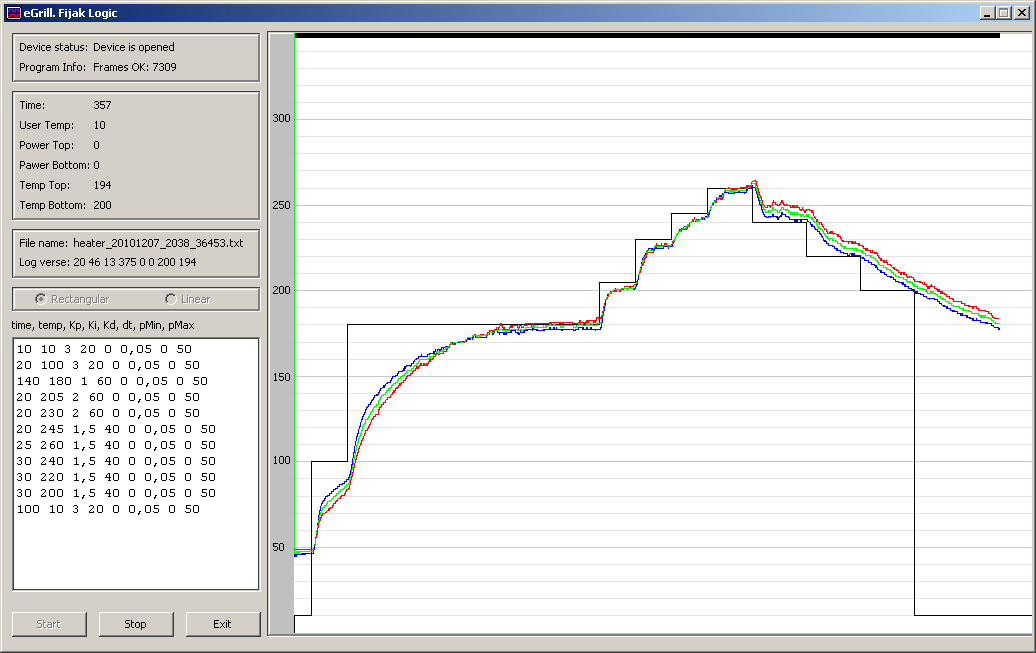
Rys 8. Prostokątny profil grzania z wieloma etapami zmiany temperatury zadanej. Profil start 50
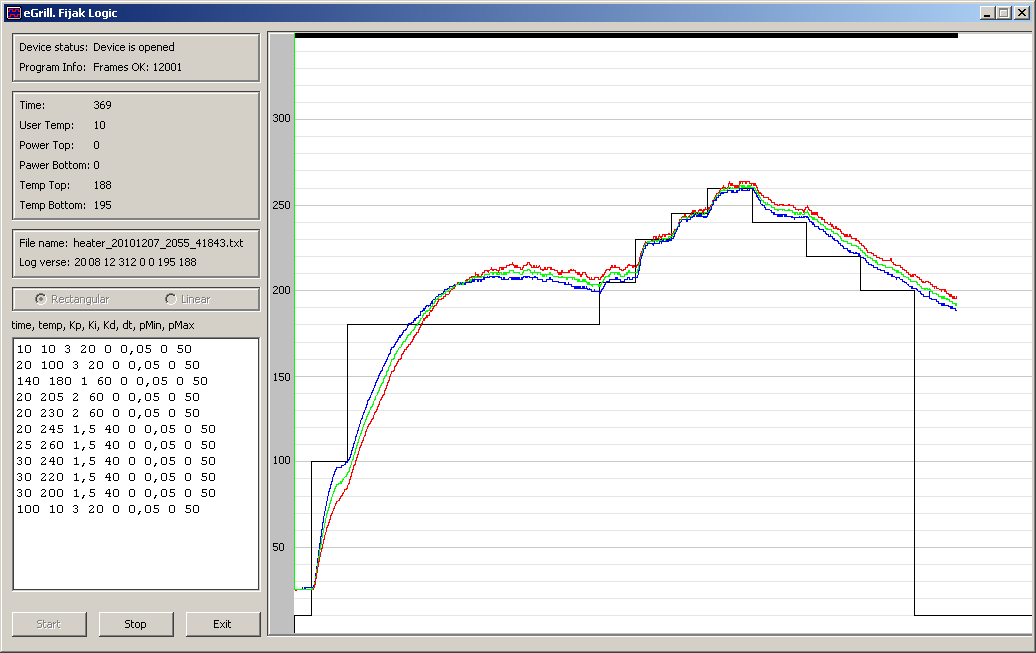
Rys 9. Prostokątny rofil grzania z wieloma etapami zmiany temperatury zadanej. Profil start 25
Na rysunku 8 i 9 przedstawiono dwa teoretycznie identyczne zadane profile grzania które jednak mają inny efekt końcowy. Jedyna różnica to temperatura początkowa procesu grzania. Profil został dobrany do temperatury początkowej 50 st.C tak aby możliwe było szybkie osiągnięcie przez piec gotowości do kolejnego cyklu grzania. W przypadku, gdy proces grzania rozpoczyna się w temperaturze 25 st.C widać wyraźnie, że nastawy regulatora powodują znaczące przekroczenie temperatury trzeciego etapu grzania. Efekt ten można zminimalizować poprzez dobór innych nastaw regulatora PID lub poprzez zastosowanie etapów pośrednich pomiędzy procesami.
Dla tych samych nastaw, na rysunku 10, przedstawiono profil grzania dla liniowej charakterystyki wartości zadanej.
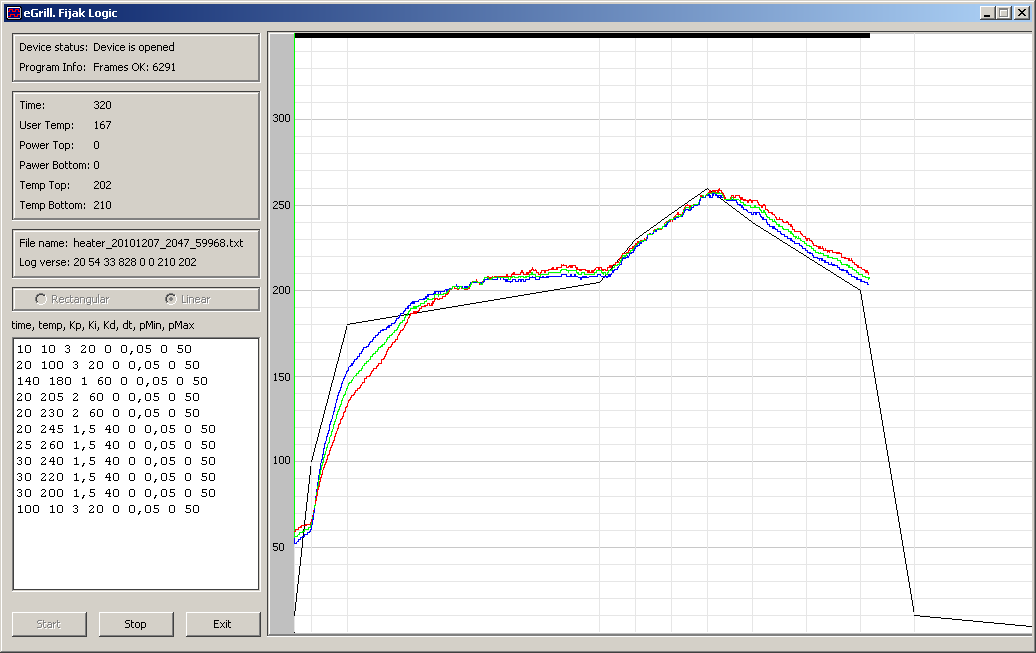
Rys 10. Liniowy profil grzania z wieloma etapami zmiany temperatury zadanej. Profil start 50
W przypadku profilu z rysunku 10 widać, że istnieje duża różnica pomiędzy sterowaniem „liniowym” a „prostokątnym” (skokowym). Po wielu próbach okazało się, że sterowanie liniowe jest lepsze do osiągnięcia płynnej zmiany temperatury, jednak to sterowanie skokowe umożliwia lepsze zrozumienie zasady działania regulatorów PID.